En esta práctica vamos a mejorar el robot permitiéndole variar su función en función de la distancia al objeto. Así haremos que conforme se vaya acercando reduzca su velocidad y no sifra ningún daño.
En el caso de que no funcione correctamente el cambio de velocidad, será debido a los motores, ya que alguno de ellos a bajas velocidades tienen problemas con el funcionamiento.
Está probado y es correcto el código empleado, es más, con motores de calidad se podría hacer incluso más efectivo.
El suelo resbaladizo del instituto hace que el robot no traccione bien. Probar en suelo que agarre más.
El suelo resbaladizo del instituto hace que el robot no traccione bien. Probar en suelo que agarre más.
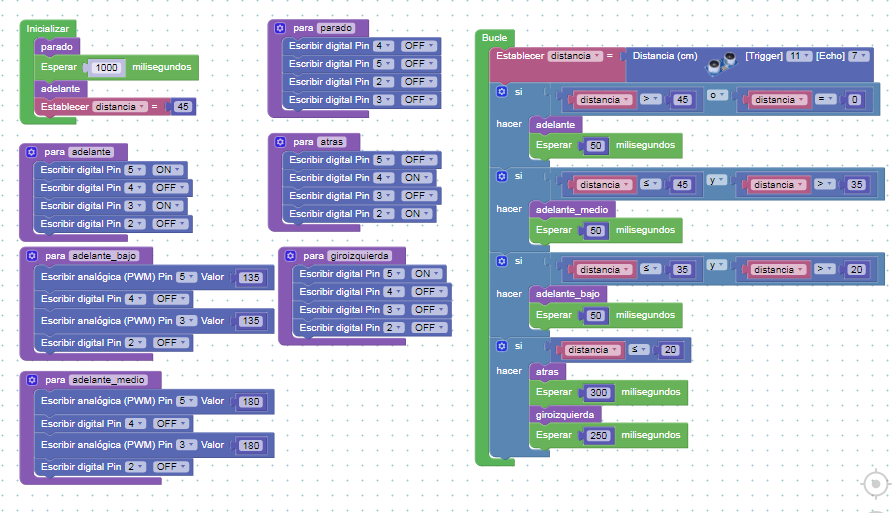 |
| Los valores de marcha atrás y giro son orientativos. |








